

 Back to Blog
Back to BlogBy Lauren Nagel
Lagrangian particle tracking aims to characterize the movement of suspended particles - how they disperse and interact with air flows. Researchers commonly study Lagrangian particle dispersion by tracking seed particles or helium-filled bubbles with cameras and computer vision.
But what if a drone, easily tracked and equipped with key sensors, could behave like a Lagrangian particle?
The Intelligent Robot Motion Lab at Princeton University sought to answer this question, seeing an opportunity for drones to help us better understand the dispersion of particles and pollutants in the atmosphere.
Table of Contents:
-
Eulerian and Lagrangian approaches to flow measurement
-
Lagrangian example: tracking wind flows with drones
-
Applications for a Lagrangian approach to particle tracking

Figure 1: Nathaniel Simon of the IRoM lab with their 6x3 Windshaper
1. Eulerian and Lagrangian approaches to flow measurement
The Eulerian and Lagrangian approaches to flow measurement both seek to understand the flow of particles in suspension, but use different approaches to do so. The Lagrangian method records a particle’s trajectory from the particle’s own frame of reference, whereas the Eulerian method records particle properties from a fixed point in space.
In “All Things Flow: Fluid Mechanics for the Natural Sciences” (2019), Dr. Smyth explains that in practice, “Lagrangian information concerns the nature and behavior of fluid parcels, [whereas] Eulerian information concerns fields, i.e., properties like velocity, pressure and temperature that vary in time and space.” This leads to a fundamental difference in how data is collected using Lagrangian and Eulerian approaches.
In a Eulerian approach, sensors are placed at a fixed point to record data on the properties of particles passing through that point. With a Lagrangian approach, the particles themselves are tagged and tracked.
A flowing river is a common metaphor for illustrating the difference between Eulerian and Lagrangian approaches. In the Eulerian perspective, particle properties are recorded from a fixed point on the river bank. In the Lagrangian approach, individual particles, or a boat travelling parallel to them, are tracked as they move downstream with the flow.
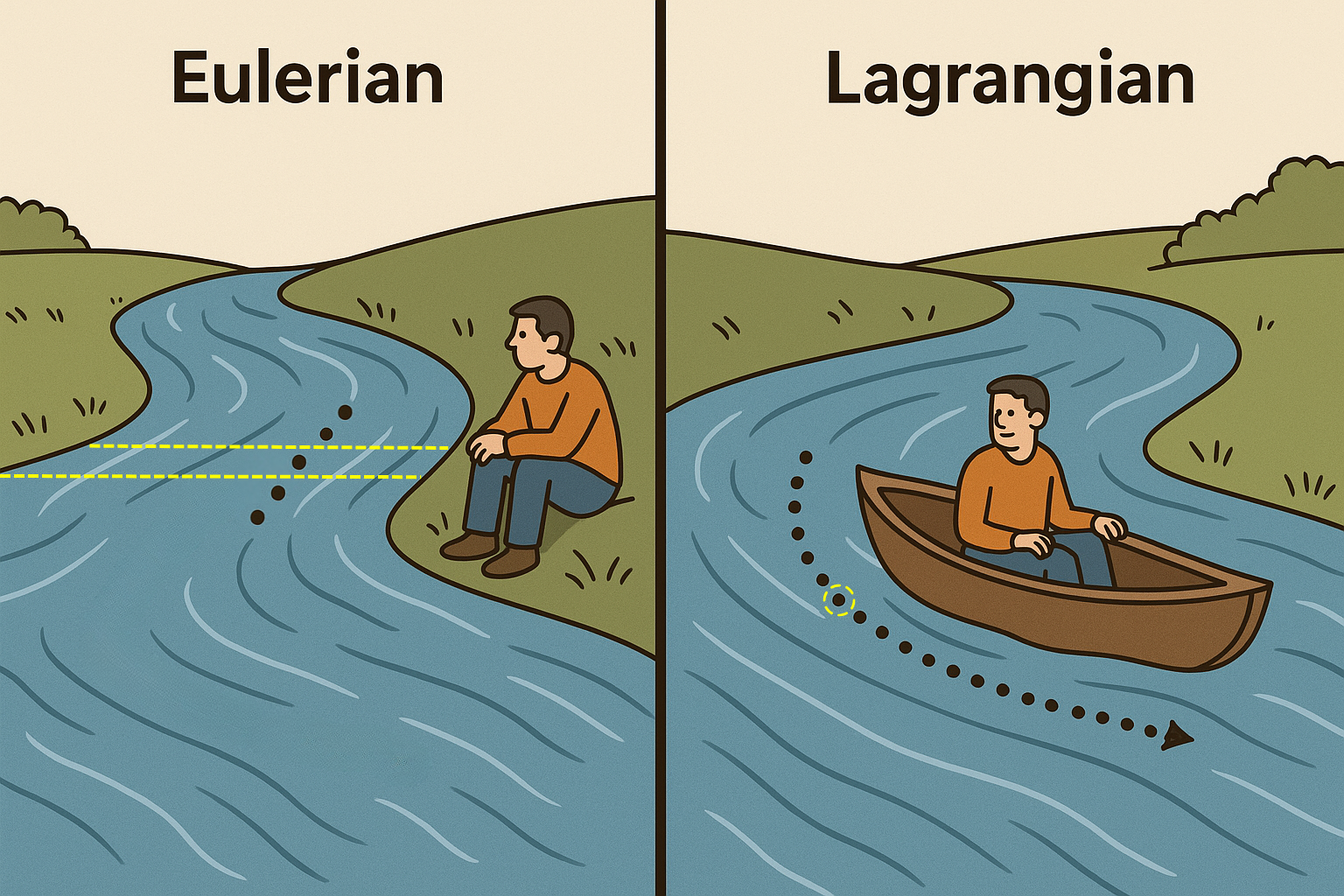
Figure 2: Eulerian measurement of particles passing a fixed point vs. Lagrangian measurement tracking particles in a flow
Historically speaking, the Eulerian method has been the preferred approach due to the fact that it is easier to implement. In their study, “Comparison between Lagrangian and Eulerian approaches in predicting motion of micron-sized particles in laminar flows” (2014), Saidi et al. explain this effect, remarking that “the calculations in Lagrangian approach are quite more time consuming than Eulerian approach since in Eulerian approach, an average behavior of particles is investigated instead of the behavior of each existing particle”.
That said, the Lagrangian approach offers a unique, valuable look at how particles disperse. If it could be more easily implemented, would the technique be used more frequently?
Recommended for you: How Airspeed Affects Propeller Efficiency
2. Lagrangian example: tracking wind flows with drones
Princeton’s Intelligent Robot Motion (IRoM) Lab values the Lagrangian flow tracking approach, especially in the context of studying pollution dispersion, a potential use case of their findings.
To make Lagrangian techniques easier to implement and more effective, the IRoM research team made use of drone technology in a project called “LaDrone”, short for Lagrangian Drone.
Prior to developing LaDrone, the IRoM lab used an autonomous robot called “FlowBot” to map flow fields using a sonic anemometer. FlowBot can navigate between fixed points but is stationary when taking measurements, so the data recorded is Eulerian in nature.
Wanting to circumvent this limitation, they asked themselves, “What if we could get a drone to do the same thing – move freely as a Lagrangian particle?”
To answer this question, they replaced FlowBot with LaDrone, designed with three key properties for effective emulation of individual fluid particles:
-
Lightweight Design: LaDrone weighs only 40 grams, allowing it to react more rapidly to subtle changes in the velocity of the surrounding fluid.
-
Gravity Compensation Control (Neutral Buoyancy): LaDrone operates using a simple control rule to mimic the behavior of a fluid particle: it compensates only for gravity, allowing aerodynamic forces to drive its motion in all directions, maintaining zero roll and pitch angles while producing thrust equal to its weight.
-
Centimeter-level GNSS Tracking: LaDrone uses a post-processing kinematic approach that applies corrections to improve position tracking to sub-centimeter precision.

Figure 3: LaDrone in front of Windshaper (click for video)
IRoM’s next task was to test LaDrone’s ability to mimic the behaviour of a particle in a wind flow. They made use of their 6x3 Windshaper in order to do so, which offers the advantage of generating controllable, reproducible wind flows.
The Windshaper’s 162 wind pixels are each individually controlled, meaning the user can set unique wind speeds for each fan.
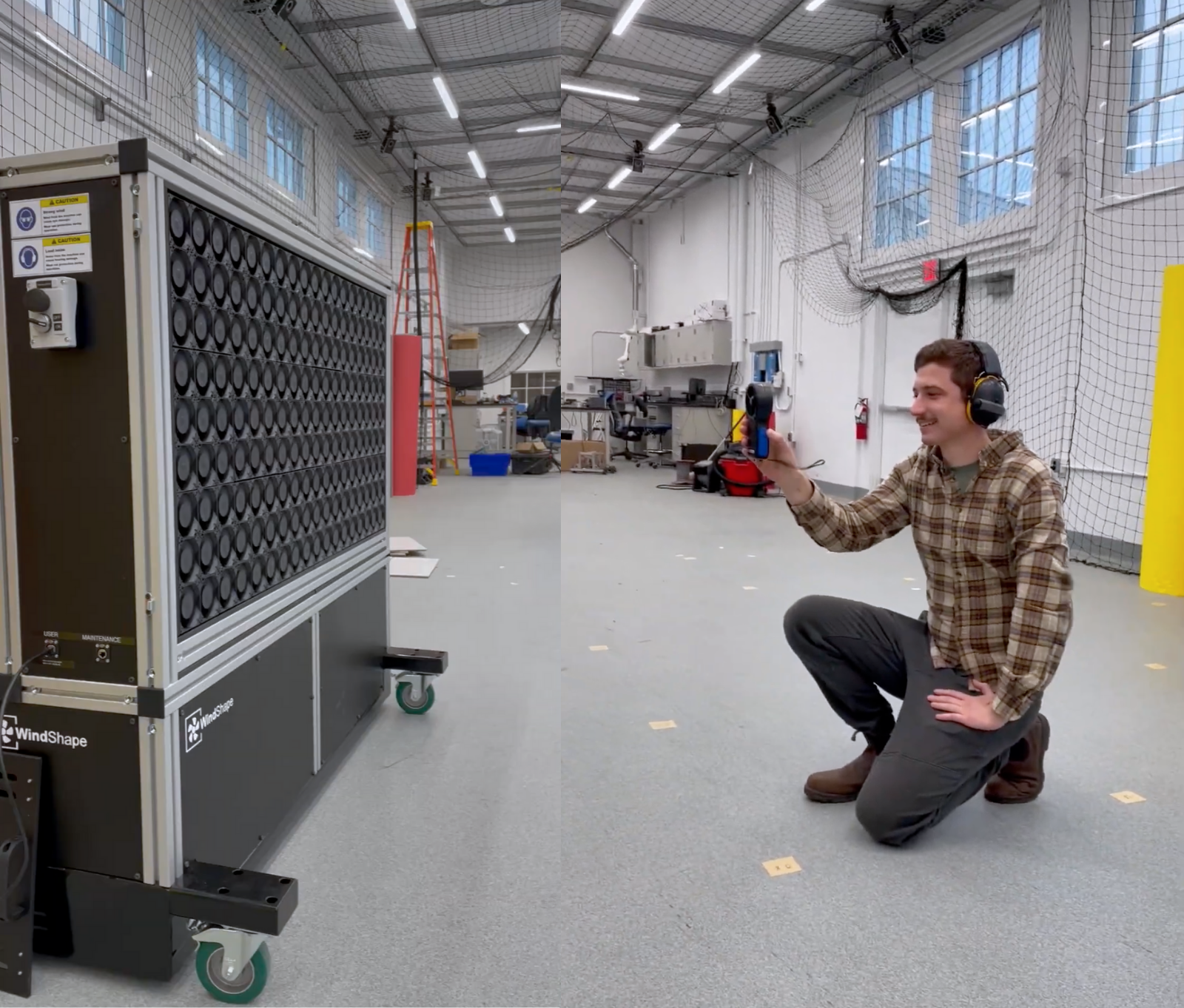
Figure 4: 6x3 Windshaper at Princeton’s Intelligent Robot Motion Lab
What they observed in their free flight testing was that LaDrone was quick to react, but moving more slowly than the surrounding particles, tracking about 50% of the flow speed.
Inspired by work in the field of fast-tracking control (Bollt et al., “How to extract energy fromturbulence in flight by fast tracking, 2021”), they adjusted LaDrone’s controller settings to not only sense the wind gusts, but to amplify their effects.
With each trial, the modified “gust-accepting” controller was able to track the bubble velocity with even greater precision, especially compared to the “gust-ignoring” and “gust-rejecting” controllers.
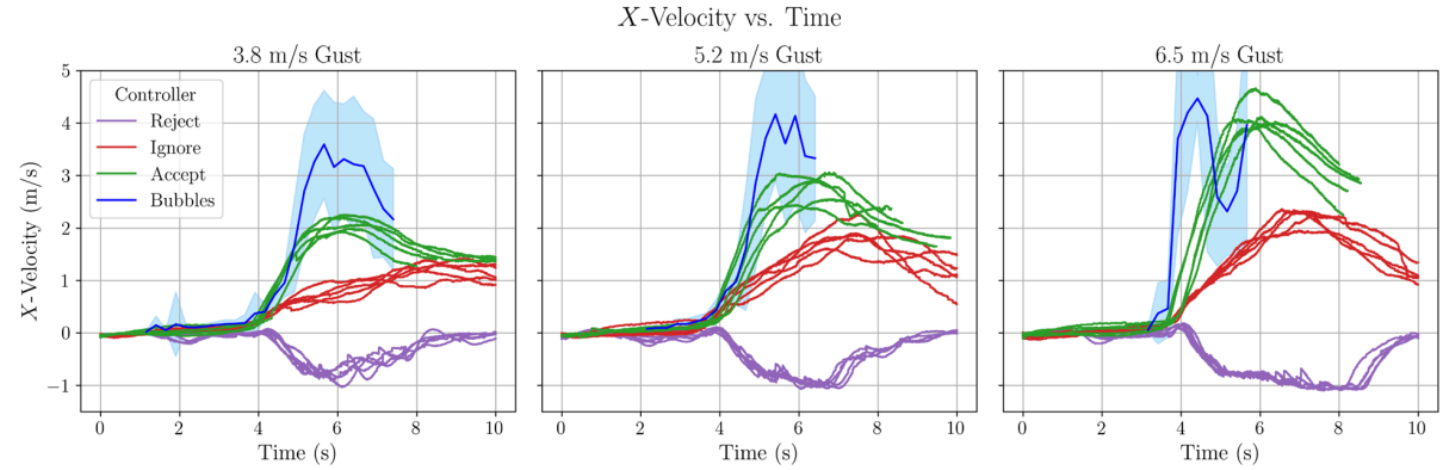
Figure 5: Velocity tracking ability of controllers accepting, ignoring, and rejecting gust feedback
This modification resulted in the exact effect they were hoping for: with every test, LaDrone was behaving more and more like a particle.
Further reading: Mapping Drone Performance (Power and Efficiency)
3. Applications for a Lagrangian approach to particle tracking
The most compelling use cases for Lagrangian particle tracking often involve environmental dispersion studies, looking at how suspended particles travel over time. By following individual particles, researchers can gain valuable insights into dispersion patterns across a range of real-world scenarios.
Here’s a few examples of applications:
-
Predicting wildfire smoke propagation
-
Tracking airflow to limit the spread of airborne diseases
-
Modeling the impact of new industrial projects on neighbouring air quality
Employing drones enhances the power of the technique: in addition to tracking the trajectory of the drone, onboard sensors can record flow properties from within the flow to make greater predictions about the particles involved.
The IRoM lab sees another application for this method: extracting energy from wind flows to enable more efficient flight. Stay tuned for updates on their research on the topic.
You might also like: Tested: Are Single-Blade Propellers Really More Efficient?
Conclusion
Lagrangian particle tracking is a powerful technique with the potential to improve data collection across numerous domains. The technique becomes even more powerful with the introduction of drones, such as LaDrone, which can greatly enhance data collection.
For more information about the IRoM Lab’s research projects, visit their website.
For more information on the LaDrone project, visit Dr. Nathaniel Simon’s dedicated web page.






Leave a comment