

 Back to Blog
Back to BlogVideo Tutorial - Improve Drone Flight Time
The goal of this report is to demonstrate a simple process for extending your multicopter flight time. Many concepts presented here also apply to fixed-wings vehicles. The concepts applied here can also be used to increase your drone's lift capacity.
Table of Contents
- Introduction and Assumptions
- How does a drone fly?
- Efficiency formula
- Find the most efficient drone propeller
- Find the most efficient drone motor
- Choosing an ESC
- Calculate drone flight time (with calculator)
Note: We will be using the Series 1585 thrust stand to gather motor and propeller data for this article.

1. Introduction and Assumptions
The optimization process is a loop, so we need to start by making some assumptions. First, let’s assume that the drone already flies, so you have an existing design from which you know the weight and the battery size. Additionally, we will optimize a multi-rotor that is mostly hovering (our drone is neither a racing drone nor a competition drone).
Further reading: Drone Design Calculations and Assumptions

Figure 1: The Otus Quadcopter
To better illustrate the process, we will use the Otus Quadcopter as an example, though this method is applicable to any flying UAV.
The first unoptimized version of our quadcopter has:
- 4 propellers: Gemfan 5040
- 4 motors: Hypetrain 2207-2450Kv motors
- 4 ESCs: Afro 20A Race Spec Mini ESC with BEC
- 1 battery: Turnigy nano-tech 1300mAh 4S 45~90C Lipo Pack
- Frame and load
With this current design, our flight time is ≈ 4 minutes.
2. How Does a Drone Fly?
The first step is to understand how a drone can fly and take-off. In order for a drone to become airborne, it must overcome its weight and drag. A drone’s weight is the product of its mass times gravity and drag is the force resisting the drone's motion through the air, which is dependent on reference area, air density and flow velocity.
The rotation of the propellers generates thrust and allows the drone to rise and maintain flight. At hover, we can assume that the combined thrust of the propellers is equal to the drone’s total weight.
From this assumption and with the weight of the drone, we can deduce the thrust required by each propeller in order to maintain hover. Here, our drone weighs 777 g, so we need a total thrust of 7.6 N to hover or 1.9 N per propeller.

Figure 2: Drone weight and hover thrust requirements
To keep a good control authority, the maximum thrust achievable by the propeller should be about twice the hovering thrust. Keep in mind this is just a recommendation. Racing quads will have a much higher maximum thrust to weight ratio.
We are looking for the most efficient propeller producing 1.9 N of thrust that has a maximum size of 6 inches, and can achieve 3.8 N of peak thrust.
We can vary parameters such as pitch, size, profile, material, and brand to find our most efficient propulsion system.
3. Efficiency Formula
Efficiency is the ratio of the output divided by the input. Here, the propellers convert mechanical energy into thrust.

4. Find the Most Efficient Drone Propeller
First, make an initial propeller selection based on manufacturer data. Unfortunately, propeller testing is not standardized and you cannot compare the data provided by different manufacturers. Manufacturers often provide the bare minimum technical specifications, so it is up to the buyer to have some knowledge about expected performance before purchasing.
We have compiled a database of drone motor, propeller and ESC data that can help you evaluate propellers before purchasing.
Further reading: How to Use Our Database of Drone Motors, Propellers and ESCs
You can also use our RCbenchmark Series 1585 thrust stand to test all your propellers with the same motor and record thrust, torque, voltage, current, motor rotation speed, and vibration. Optionally, you can use the database upload feature of the app that will walk you through the test process with a test script.
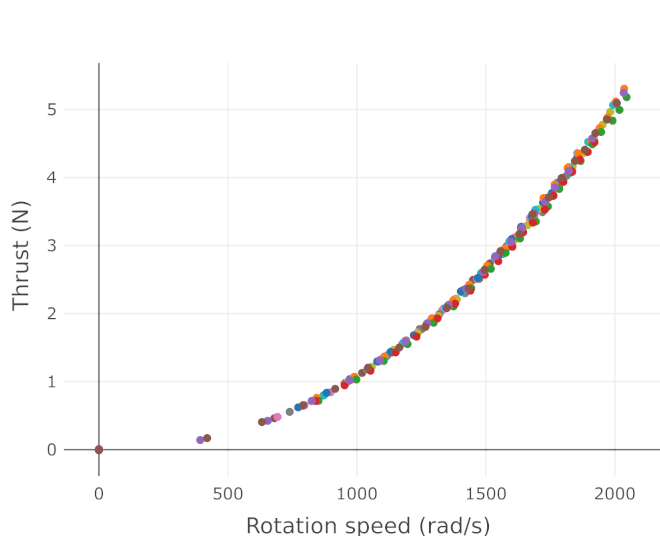
We want to measure thrust, torque and rotation speed. Propeller data is independent from motor data when you rely on torque and speed. The thrust of a specific propeller depends only on the propeller speed and the incoming air speed, not on the motor powering the propeller.
Regardless of the motor you choose, the thrust generated will be the same at a given rotation speed. This property is useful to check that your tests were performed correctly. The data points on a thrust vs. rotation speed graph for a single propeller tested with multiple motors should all be very close to the same line as in the image below.
When you have determined the desired torque and speed for the most efficient propeller at hover, you can perform a search for the motor that is the most efficient at this torque and speed. But first we need to find our propeller.
Let’s focus on only 3 propellers to keep this simple. We will test them with the Series 1585 thrust stand.

- 6030R Gemfan => diameter: 6 in, pitch: 3 in, weight 2.22 g
- 6040R King Kong => diameter: 6 in, pitch: 4 in, weight 3.38 g
- 5040R Gemfan => diameter: 5 in, pitch: 4 in, weight 3.00 g
The test can be done manually or with a script. We performed the test with a script and compared the results to those in our drone propulsion database. Here is a comparison of the propeller mechanical efficiency (N/W) as a function of thrust (N).
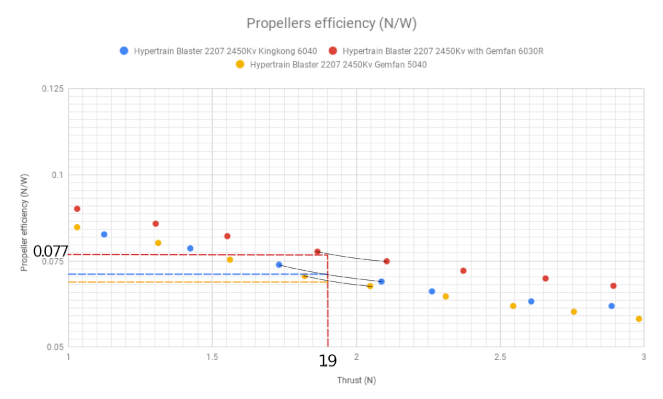
As shown in the graph, at 1.9 N, the most efficient propeller is the Gemfan 6030 at 0.077 N/W. We can rule out the two other propellers as they have a lower efficiency.
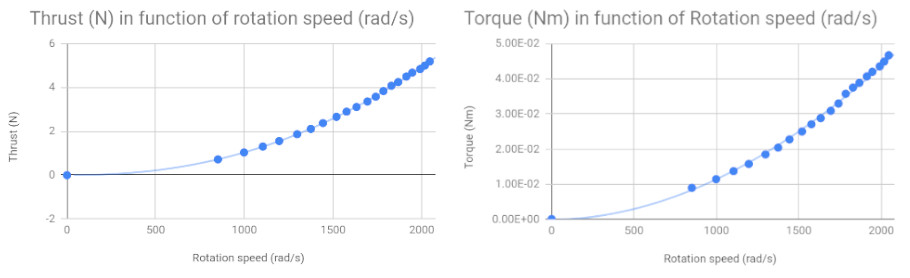
At a thrust of 1.9 N, the Gemfan 6030 operates at 1300 rad/s, where it also generates 0.0184 N.m of torque (figure 6).
5. Find the Most Efficient Drone Motor
Now that we have found a propeller, our next step is looking for the most efficient motor at the operating point of 0.0184 N.m and 1300 rad/s. We will limit our search to 2 different motors for the purpose of this tutorial, but in reality, there are many more candidates to choose from.

The graph in figure 8 shows the mechanical efficiency of the tested motors when they are equipped with a Gemfan 6030 propeller. At 1.9 N of thrust, the efficiency of the Multistar is 68% while the efficiency of the EMAX is 60%. Thus, we conclude that for this specific propeller at hover, the most efficient motor is the Multistar Elite 2306.
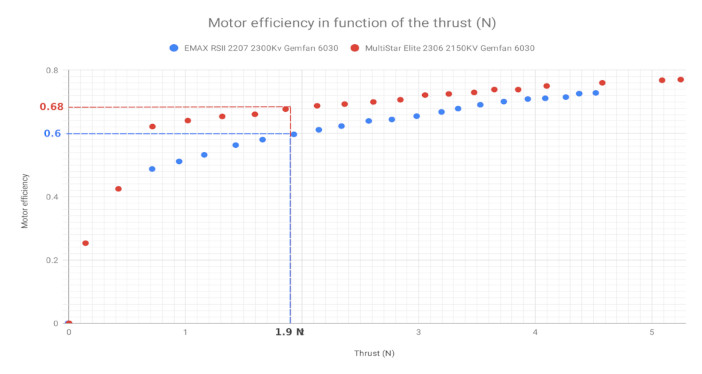
The graph above allowed us to observe the efficiency difference for the torque-speed lines of two motors. We did not determine that the Multistar is a better motor in general, only that it performs better for this specific propeller. The Emax motor may be more efficient than the Multistar with another propeller.
Another thing we must check is that this motor is also capable of generating the peak propeller thrust for sufficient control authority. Earlier, we said we are looking for the most efficient propeller at 1.9 N of thrust that can also achieve 3.8 N of peak thrust.
We confirm graphically that this motor is capable of generating the 3.8 N peak thrust we need. At 3.8 N, the motor is capable of generating 0.035 N.m of torque at 1783 rad/s.
6. Choose an ESC
Once the motor and propellers are chosen, we can select a suitable ESC. For now, we just pick an ESC capable of delivering the motor’s peak current of 7 Amps with a safety factor. We will choose the Afro Race Spec Mini ESC which supports 20 Amps. There are some optimizations that can be done on the ESC, but that is outside the scope of this article.

7. Calculate Drone Flight Time
Finally, we can use the information we have gathered to determine our flight time:
The capacity of the battery (Ebattery in Wh) can be expressed as the Flight Time (FT) in hours, multiplied by the generated power (Power in Watt).

The battery capacity (Ebattery) is equal to the weight of the battery (Wbattery in grams) multiplied by the energy density (sigmabattery in Wh/g).

The total power (Power in Watt) is equal to the weight of the drone (Wdrone (g) = Wframe (g) + Wbattery (g)) divided by the propellers efficiency (propefficiency in g/W).

The propeller efficiency is a function of the total weight of the drone divided by the number of propellers on your drone.
So by combining the equations, we obtain the flight time [eq1]:

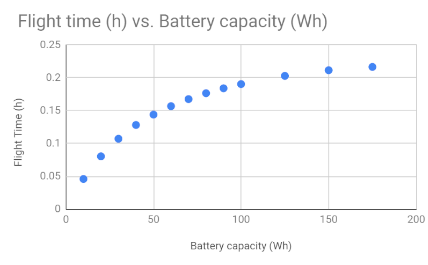
An increase in the weight of the battery increases the division term in the equation above and reduces the propeller efficiency. In this way, the battery can influence the flight time in both directions. Larger batteries have a higher capacity, which can increase flight time, but they also have a higher weight, which increases the thrust required for operation, thus decreasing the flight time. Figure 11 shows an example of how to find the 'sweet spot' when balancing battery capacity and weight.
Those formulas are implemented in the spreadsheet here:
Use our Google sheet to easily calculate drone flight time.
There are some assumptions that you must add when using the Google sheet, such as the weight and capacity of your battery. Also, write the total weight of your quad (WITHOUT the battery) and the number of propellers. Now you have everything you need to calculate the flight time!
Further reading: Drone Building and Optimization (eBook)
You can observe the effect of varying the battery capacity on the flight time. As you can see, increasing the battery to a 33.3 mAh increases the flight time by a few minutes, but reduces the control authority as the weight to thrust ratio decreases. Going even bigger shows very little benefits in terms of flight time, but increases noise and reduces control authority.
Conclusion
In this article we covered how to choose a propeller, a motor, an ESC and a battery for our drone, and we looked at how to compare efficiencies, analyze data and calculate flight time.
All these modifications can change the total weight of your drone, especially if you choose another battery. You may need to restart the analysis if you significantly change the weight of the drone.
As we mentioned at the beginning of the article, the drone building process is a loop that repeats itself as we learn about our components and performance through testing. We make assumptions, choose parts based on those assumptions, test the system, swap the parts and repeat the process.

Regardless of the tool used to capture the data, we strongly recommend that you measure torque during your tests. This will allow you to analyze motor and propeller data independently and measure efficiency. We have designed multiple tools to make the data collection and analysis easier and more accurate.
The automatic testing capability of the Series 1585 combined with our database of drone propulsion data should allow you to select the best motor, propeller and ESC in a few hours of testing. The tests can increase flight time, lift capacity, and reduce the heat produced by the system, which increases the life of your components.
If you want to dig deeper in the subject of motor theory to fully optimize your motor, watch the video “How to Maximize Your Drone's Flight Time” on our YouTube channel. In this video we take you through the steps we took to build the Otus quadcopter and how we increased its flight time from 4 to 8 minutes and even up to 13 minutes!
For further reading on this optimization process, check out Part 2 of this article - The Drone Design Loop Calculations and Assumptions






Lauren Nagel
May 26, 2025
Hi Đạt, Thank you for your comment. We have an eBook on drone building that may answer your question. You can get it here: https://www.tytorobotics.com/pages/ebook-landing
Let us know if you have any other questions. – Lauren at Tyto Robotics