

 Back to Blog
Back to Blog1. Applicable products
- RCbenchmark Series 1520 Thrust Stand
- RCbenchmark Series 1580 Thrust Stand
- RCbenchmark Series 1585 Thrust Stand
- RCbenchmark Series 1780 Thrust Stand
2. What describes your problem?
Please find within the following table which describes your problem. Once selected, mark down the troubleshooting points to follow.

3. Problem specific troubleshooting
3.1 The propulsion data that I obtained from the thrust stand is not matching the advertised performance from the motor or propeller manufacturer.
When you observe a difference in performance (thrust, torque, efficiency) between the value tested on the thrust stand and the value given by the motor/propeller manufacturer, please always keep in mind that the manufacturers may sometimes overstate the performance of their product.
Also, depending on the power source, the voltage drop within a LiPo battery may also significantly affect the measured performance compared to having a relatively constant output power supply.
If you observe a significant difference (> 15%) between the measured data and the published data, please follow this guideline:
- When using the Series 1580/1585, recalibrate all the load cells.
- Check if the wire-connection is correct.
- Open the RCbenchmark GUI and go to Automatic control tab
- Run an automatic script: sweep - discrete with the following parameters:
- var minVal = 1000; // Min. input value [700us, 2300us]
- var maxVal = 1800; // Max. input value [700us, 2300us]
- var stepsQty = 8; // Number of steps
- var settlingTime = 5; // Settling time before measurement input change [s]
- var samplesAvg = 25; // Number of samples to average
- var stepsGoDown = false; // If true, the test will step down, if false, the steps will only go up.
- var repeat = 2; // Number of times to repeat the same
- By finishing this script, you shall be able to find the at each throttle, the performance measurement (thrust, torque, voltage, current, RPM, efficiencies) in the output CSV file.
- Please first compare the relation RPM-thrust on the same propeller. Generally speaking, given exactly the same propeller, the thrust shall be very similar with a given RPM. If you find your thrust is significantly smaller than the advertised thrust at the same RPM, go to section 3.3.
- And then, please try to locate the motor efficiency in the CSV file, to see if you observe any non-reasonable efficiency (e.g. <30% or >100%), go to section 3.2 for more detailed troubleshooting steps.
- If you find both the RPM-thrust and the efficiency are normal but still believe the measured data is inferior to the stated value from the motor/propeller manufacturer, you may contact us by email at support@tytorobotics.com and include the following info:
- Subject: Measurement discrepancies
- Motor, propeller and ESC that you are using
- Motor, propeller published performance data from the manufacturer
- The CSV output file you ran with RCbenchmark thrust stand
- Power source
- Picture of your setup
3.2 I have motor efficiency higher than 100%.
It is absolutely not normal having the output mechanical power superior to the input electrical power. As long as you observe an efficiency >100%, there must be an error somewhere in the measurement.
In our measurement, electrical power = voltage x current; mechanical power = torque x speed. You may need to isolate each of the parameters in order to fully run the troubleshooting.
- If you are using the LiPo battery, check if it is fully charged and if it is within the acceptable range of the output voltage (1S : 3.3 V to 4.3 V).
- Generally, current is very stable as shunt resistors or hall sensors are reliable. If unsure, check with a multimeter in a low power mode.
- Check the RPM probe reading:
- If you are using the Series 1520/1580/1585 electrical RPM, make sure that you have entered the correct number of poles. If unsure, refer to guideline S15ERP for detailed troubleshooting.
- If you are using the Series 1520/1580/1585 optical RPM, make sure that you have properly wrapped the rotor with black tape to hide all reflective engraving, and have a correct length of white tape, as well as a correct distance between the tape and the probe. If unsure, refer to guideline S15ORP for detailed troubleshooting.
- If you are using the Series 1780 optical RPM probe, also make sure the black tape, the length of white tape and the distance. Refer to guideline S17ORP for detailed troubleshooting.
- Compare the measured data with the published data from the propeller manufacturer to see if you obtain a similar thrust given the same RPM. If this number is close to the advertised value, that usually means you have a correct RPM value and you may continue troubleshooting for the torque; if you don’t have a correct RPM value, you may consider replacing an optical probe, or switching electrical/optical RPM reading.
- Please make sure that you DO NOT connect optical and electrical RPM probes simultaneously. This will drive the software to crash.
- If you are using the Series 1580/1585, recalibrate the load cells following the wizard in the GUI and try to run the tests again.
3.3 The thrust that I measured is way too low/high.
In a single-motor setup, it is usually recommended to use the thrust stand in a push mode, which means the propeller pulls air from the stand towards the open area as proposed in the following figure:
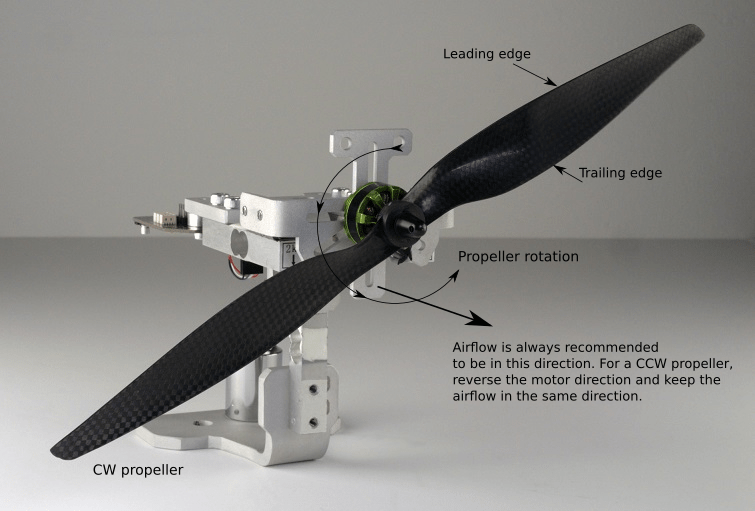
If you still find the thrust generated by the propeller is way too low or too big, please follow this guideline:
- Make sure rotation: leading edge that rotates in the front.
- If you find the propeller is rotating with the trailing edge in the front, switch any two out of three poles to change the direction.
- Please make sure that the propeller you are using is larger than the surface area of the thrust stand, as drag may sometimes play a key role on the thrust measurement.
- When the propeller that you used is too small for the thrust stand, the result may be severely affected. Please use the appropriate stand for the right size of propellers.
3.4 The value that I measured from the stand is different from the data I obtained from the same stand in the past.
The value that you obtained can sometimes be different than what the motor and propeller performed in the past. This can be due to the following reasons:
- The power source: you may have changed using the power supply to the LiPo battery or vice versa.
- The motor: aging coils may affect the motor efficiency
- The ESC: change of the ESC can sometimes trigger issues, please make sure to use an ESC that is properly rated for this motor, the maximum amperage shall never be too far or too close to the motor’s limit
- Sampling rate: if you are running a automatic control script, please make sure to have a large enough sampling average as the ESC may compensate the speed during a hold and can trigger higher/lower torque and thus affect efficiency
Please also understand that the thrust stand is a tool to characterize the overall performance of your propulsion system, it is not used for the dynamic testing and many more factors may contribute to the measurement discrepancies.
Under some circumstances, the measurement discrepancies may also be due to the aging load sensors. If you are currently using the Series 1580/1585, you may recalibrate the load cells using the wizard in the GUI. If you are currently using the Series 1780, you may follow the guideline S17LMU for more details to diagnose if the LMU is still working under good shape. We recommend a recalibration of the LMU every 12 to 18 months.
If you wish to recalibrate the LMU of your Series 1780, please send a request to support@tytorobotics.com and indicate the following info:
- Subject: Series 1780 LMU recalibration - due to discrepancies
- Send us screenshots of the discrepancies
- Run through section 3.2 in S17LMU and send us the load cell raw data
- Confirm the date of your purchase of the Series 1780
4. Problems persist?
We support all issues related to the measurement tools itself, and we can provide limited support regarding your test setup and power-train selection. If you need extended support for your specific tests, manufacturing facility or UAV, contact us at sales@tytorobotics.com. We offer extended support contracts including phone and video conference at affordable rates.
To obtain a solution to your problem faster, please indicate which troubleshooting steps you have already done. Also, include the debug log from the software. If relevant, please also include screenshot or pictures of the issue.
4.1 Cross-reference from other types of problem
S15LCS: a load cell failure may lead to incorrect measurement
S15ERP: RPM reading can significantly affect the efficiency and thus make discrepancies
S15ORP: RPM reading can significantly affect the efficiency and thus make discrepancies
S17LMU: a load cell failure may lead to incorrect measurement
S17PCC: a shunt resistor or hall sensor may lead to incorrect measurement
S17ORP: RPM reading can significantly affect the efficiency and thus make discrepancies