

 Back to Blog
Back to Blog1. Applicable products
- RCbenchmark Series 1520 Thrust Stand
- RCbenchmark Series 1580 Thrust Stand and Dynamometer
- RCbenchmark Series 1585 Thrust Stand and Dynamometer
2. What describes your problem?
Please find within the following table which describes your problem. Once selected, mark down the troubleshooting points to follow.

3. Problem specific troubleshooting
3.1 There is no reading on the optical RPM probe
- Please confirm the connection between the optical RPM probe and the circuit has been set up properly following the setup guideline come with the optical RPM probe
- Please confirm that the optical RPM probe has been powered by a 5V power properly. For the customer who purchased the Series 1585 and Series 1580 with v1.8 or higher version PCB, the 5V power output has been integrated to the S1 port on the circuit. Please put the jumper to the proper position following the instruction on the PCB. For the customers who are using the Series 1520 or 1580 with lower version circuit, please use your own power supply to power the optical RPM probe.
- Please check the distance between the optical sensor on the optical RPM probe circuit and the reflective tape on the motor. It needs to be less than 5mm.
- Please confirm the length of the reflective tape on the motor is longer than 10mm
- You can do the following steps to verify the optical RPM probe circuit is functional
- Connect the optical RPM probe on the Dynamometer circuit following the guideline
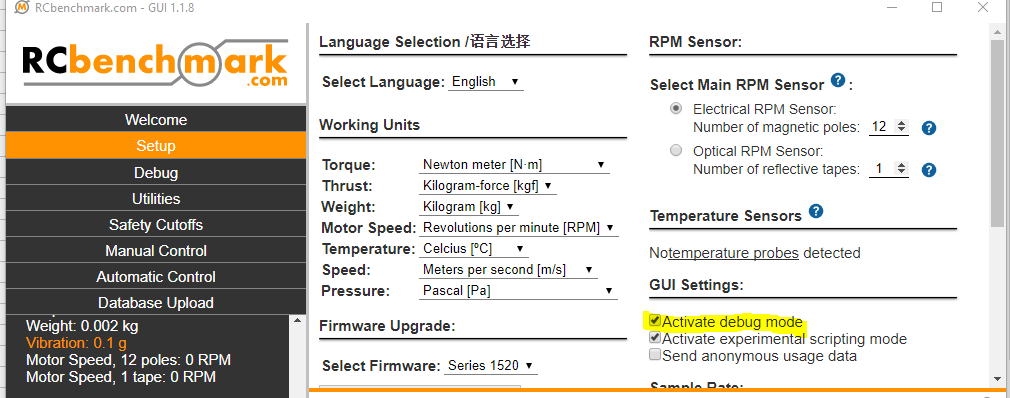
- Connect the circuit to the RCbenchmark GUI and activate the debug mode on the GUI. The debug mode can be activated in the RCbenchmark GUI -> Setup -> GUI Settings -> Activate debug mode
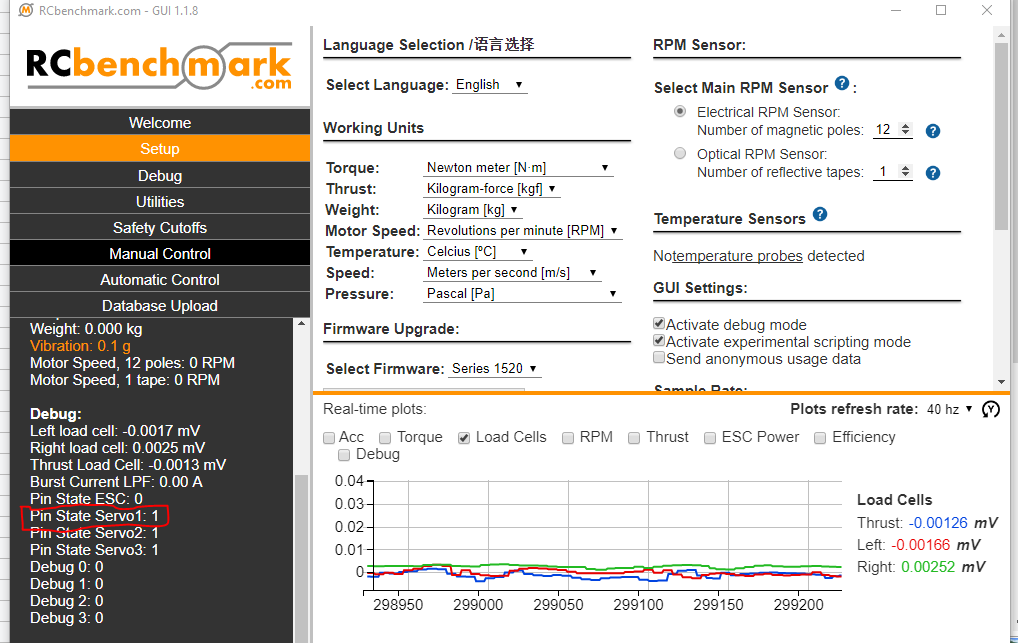
- Put a reflective tape in front of the sensor on the optical RPM probe and then remove. If the optical RPM probe circuit is functional, you will find that the number on the Pin State Servo1 will change.
- If you find that you are still not able to read any data of the RPM from the GUI, please send us the invoice when you purchased our product, the picture of the circuit, and the description of the issue you met to support@tytorobotics.com. We will give you suggestions for further troubleshooting and solutions for the issue you met.
3.2 The RPM reading seems wrong
- Please check the distance between the optical sensor on the optical RPM probe circuit and the reflective tape on the motor. It needs to be less than 5mm.
- If there is some logo or reflective surface on the motor, please use black tape to shield it
- If you are using multiple pieces of tape on the rotor, ensure they are equally spaced, and set the number of divisors per turn in the “Setup“ tab. The number of tapes per turn acts as a divisor of the speed value. If you have just one piece of tape (black-white in one turn), set the number of divisors to 1. If you have 2 tapes (black-white-black-white in one turn) set the divisor to 2.
- For the motor that has a large diameter, please put a longer reflective tape on the motor for the RPM measuring.
- If you still find the reading is wrong on the GUI, please send us the invoice when you purchased our product, the picture of the circuit, and the description of the issue you met to support@tytorobotics.com. We will give you suggestions for further troubleshooting and solutions for the issue you met.
3.3 I find the RPM reading is fluctuating during the test
- Please check the distance between the optical sensor on the optical RPM probe circuit and the reflective tape on the motor. It needs to be less than 5mm.
- If there is some logo or reflective surface on the motor, please use black tape to shield it
- If you are using multiple pieces of tape on the rotor, ensure they are equally spaced, and set the number of divisors per turn in the “Setup“ tab. The number of tapes per turn acts as a divisor of the speed value. If you have just one piece of tape (black-white in one turn), set the number of divisors to 1. If you have 2 tapes (black-white-black-white in one turn) set the divisor to 2.
- For the motor that has a large diameter, please put a longer reflective tape on the motor for the RPM measuring.
- Please also check the torque and current reading on the GUI. If you find that the torque, current and RPM have the same trend of changing, it means the issue is not from the optical RPM sensor. Please check the ESC and motor in your test.
- If you still find the fluctuation issue during the test, please send us the invoice when you purchased our product, the picture of the circuit, and the description of the issue you met to support@tytorobotics.com. We will give you suggestions for further troubleshooting and solutions for the issue you met.
4. Problems persist?
We support all issues related to the measurement tools itself, and we can provide limited support regarding your test setup and power-train selection. If you need extended support for your specific tests, manufacturing facility or UAV, contact us at sales@tytorobotics.com. We offer extended support contracts including phone and video conference at affordable rates.
To obtain a solution to your problem faster, please indicate which troubleshooting steps you have already done. Also, include the debug log from the software. If relevant, please also include screenshot or pictures of the issue.
4.1 Cross-reference to other types of problem
- S15CIR: broken connector on the circuit that connects to the RPM probe
4.2 Cross-reference from other types of problem
- SITMDG: when having >100% efficiency, it can be a wrong value on the RPM value